智谱和招商局联手,在全球机器人决赛上叠衣服
2026-06-05 10:30

作者|Chester
原创首发|蓝字计划
当机器人进厂打工开始司空见惯,行业开始讲起了新的故事。
只是这一次,方向又回到了家务。
被誉为全球机器人学界"奥林匹克"的ICRA 2026(IEEE国际机器人与自动化会议),今年首次推出了面向家庭场景的LeHome Challenge家务竞赛。
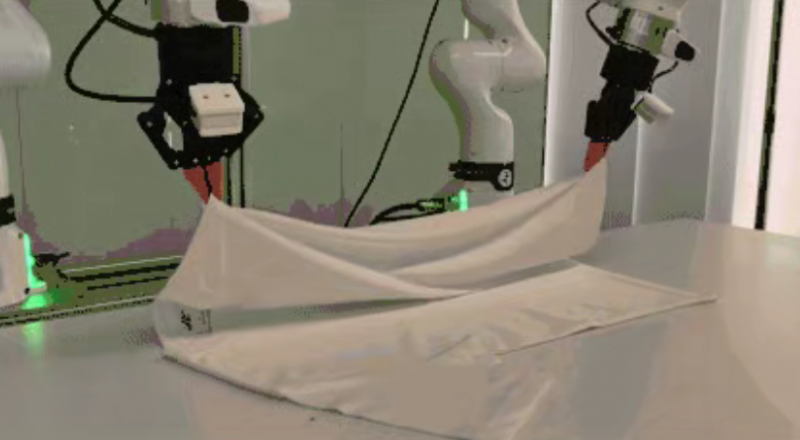
比赛的主题不是扫地,不是做饭,甚至不是洗衣服,而是叠衣服。参赛队伍需要操控SO101双臂机器人,将不同类型的衣物完成折叠。
在这场角逐中,一支不太一样的队伍闯入了仿真赛阶段决赛,成为该阶段唯一的中国队伍。
这支队伍由今年初在港股上市的智谱的具身智能团队,与招商局旗下的狮子山人工智能实验室联合组成。
说它"不太一样",是因为狮子山的重心并没有放在机器人上。
这家2024年9月才在香港科学园挂牌的实验室,背靠百年央企招商局集团,港深两地团队超过百人,却不聚焦机械臂或灵巧手。
他们最得意的产品,是一套名为LiOS的端云协同系统,目的是让机器人在训练、试错和执行中不断积累经验,再把这些经验变成更多机器人都能调用的能力。
最终的目的是,让机器人更快地学会新技能,并把技能复制到不同机器人身上。
但是,带着这样一套系统去参加叠衣服比赛,狮子山到底想验证什么?
要回答这个问题,得先理解一件事:叠衣服,对机器人来说到底难在哪。
家务机器人,从叠衣服开始?
对于机器人来说,叠衣服远比扫地擦桌子难得多。
在机器人领域,衣服属于典型的"柔性物体"。与箱子、水杯、螺丝刀这些拥有固定形状的物体不同,衣服会随着重力、摩擦力和材质变化不断变形。
同样一件T恤,从洗衣篮里拿出来时,可能是皱成一团,也可能是半展开状态,每一次出现的形态都不完全相同。
这意味着,机器人无法依赖一套预设的标准流程,每一件衣服都要求它重新判断、重新规划。
它首先要识别衣服的边缘和朝向,判断哪里是领口、哪里是袖子;随后还要控制双手以合适的力度将衣服展开、拉平,再按照正确顺序完成折叠和码放。
只要其中任何一个环节出现偏差,后续动作就可能全部失败。
对于今天的机器人来说,这就是感知、决策和灵巧操作能力的一次综合考试。
一方面,机器人需要在褶皱、遮挡、光照变化的情况下准确理解衣物状态;另一方面,它还必须具备极其精细的力控能力:抓得太轻,衣服会滑落;抓得太重,又可能拉扯变形。
更困难的是,不同衣物之间几乎不存在统一解法:薄T恤、衬衫、卫衣、牛仔裤都有完全不同的折叠方式,机器人很难依靠一套固定动作完成所有任务。
因此,国内外几乎所有头部机器人团队,都把叠衣服作为展示能力的重要项目:
在美国,Figure AI展示过人形机器人自主完成衣物折叠,被誉为机器人界"OpenAI"的Physical Intelligence发布的pi0模型,则能够从洗衣机中取出杂乱衣物并进行整理。

在国内,优必选、千寻智能、梅卡曼德等机器人企业,也都陆续公开演示过衣物抓取、整理和折叠任务。
而在国内的机器人赛事中,叠衣服也同样成为了重要项目:2025年第二届中关村具身智能机器人应用大赛,上海张江国际人形机器人技能大赛,都把叠衣服等家务纳入重点项目。
但对于狮子山来说,参加这场比赛,真正想回答的,实际上是另一个更加宏大的问题。
让更多机器人学会叠衣服
如果一台机器人在仿真环境中学会了叠T恤,这个能力能不能在不重新训练一遍的前提下,迁移到另一台机器人、另一个场景、另一种衣物上?
狮子山对这个问题的回答是,是让叠衣服这样的技能变成一种可以被规模化复制的能力。
这个愿景听上去符合直觉,但落地极难。
机器人在仿真环境里能够完成的动作,到了真实环境中往往会因为光照变化、物体摆放差异、摩擦力、静电、布料材质乃至空气流动等因素出现失误。

这也是困扰整个具身智能行业的经典难题,而狮子山的LiOS,就是为了解决这个难题而造的。
LiOS的做法是把这道鸿沟拆解成一个可以持续迭代的闭环:
首先,机器人在仿真环境中学习如何识别、抓取和折叠不同类型的衣物;
然后,当真实机器人执行任务出现失败时,相关数据又会回传至云端,重新参与模型训练和优化。
简而言之,就是机器人做对的,吸取经验;做错的,也吸取教训;吸取足够多的经验之后,系统再将这份经验通过云端,教给更多的机器人。
为了支撑从仿真到真机的完整流程,LiOS覆盖了数据管理、模型训练、端云协同和部署运行等多个环节,试图为机器人的技能学习提供一套完整的底层工具链。
在LeHome Challenge的仿真赛阶段,实验室团队围绕抓取点偏移、展开不足、边缘未对齐、折叠错位等典型失败模式不断扩展训练数据,并通过分布式并行训练将模型迭代效率提升了数倍。
最终,系统展示了对短袖、长袖以及裤装等不同类型衣物的处理能力,顺利进入决赛圈。
实验室还构建了LeFold柔性物体操作数据集,并在HuggingFace上逐步开源,为机器人学习布料操作提供更多训练样本。
不过,仿真阶段的表现还不能说明全部问题。当策略被部署到SO101实体机器人后,虚实迁移的核心鸿沟开始显现:
打印件的刚性偏差、装配精度不足、夹爪抓取不稳,再加上真实衣物的褶皱堆叠和随机朝向,仿真中稳定的动作在真机上出现了明显的质量下降。
目前,实验室尚未公开真机环节的具体成功率数据,也没有与其他参赛队伍的横向对比可供参考。
好在,仿真到真实的鸿沟并非狮子山独有的问题,几乎所有采用sim-to-real路线的团队都面临类似挑战。
但对于LiOS这套以"技能迁移"为核心卖点的系统来说,真机环节的稳定性恰恰是它最需要证明自己的地方。
一旦迁移过来的技能在现实中大打折扣,"让更多机器人学会"的愿景就很难成立。
而且现实对LiOS的考验远不止一场比赛。
因为在他们的设想中,这套覆盖训练、迁移、部署全流程的系统,最终要成为行业共用的基础设施。
叠好衣服只是起点
在LiOS成为行业通用的基础设施之前,一个现实的问题是:这条围绕LiOS展开的路线,在产业里走得通吗?
狮子山也做硬件。实验室自研的"灵卫"智能巡检四足机器人,目前已经在物业、楼宇等场景展开试点应用。

但放在狮子山的整体布局里,"灵卫"更像是一个真实场景中的验证入口。
相比家庭里的叠衣服、收纳整理,巡检任务的边界要清楚得多:
走哪些路线、看哪些设备、识别哪些异常,流程更标准,需求也更明确。更重要的是,物业、楼宇、园区这类B端场景有清晰的付费主体,也更容易先形成商业闭环。
毕竟,一套机器人学习系统,不能只停留在比赛和实验室里。它最终要面对的,是光照变化、路线变化、设备差异、环境噪声,以及真实客户对稳定性的要求。
对狮子山来说,巡检场景的价值在于提供一个更可控的真实环境,让机器人持续运行、持续产生数据,再反过来验证LiOS的训练、迁移和部署能力。
这和叠衣服比赛其实是一条主线上的两件事。
在LeHome Challenge里,狮子山要验证的是:机器人能不能把仿真中学到的衣物操作能力迁移到真实机器上。
到了物业、楼宇、园区等场景里,它要验证的则是:一套端云协同系统,能不能支撑机器人在真实业务中长期稳定运行。前者考验技能迁移,后者考验产业落地。
但这也是狮子山的烦恼所在。
如LiOS要成为行业共用的基础设施,仅靠狮子山自己的机器人闭环还不够。它需要更多外部机器人厂商、场景方、开发者愿意接入,在这套系统上训练、部署和迭代自己的机器人能力。
目前,狮子山尚未披露LiOS在体系之外的大规模接入情况。这套系统已经在比赛和自有场景里展示了想象空间,但它能不能真正变成行业底座,还需要更多伙伴和更多真实项目来验证。
这也是"做基础设施"这条路最慢、也最难的地方。
相比推出一台机器人,基础设施很难在短时间内制造爆点。端云协同、数据闭环、模型泛化、跨平台部署,这些能力都需要长期投入,也需要在一次次真实任务中积累。
而当下,整个具身智能行业仍处于早期阶段。无论是柔性物体操作成功率、复杂环境下的稳定性,还是整体部署成本,都距离大规模普及存在不小差距。
不过,每一次技术浪潮背后,都需要有人造产品,也需要有人搭底座。
如果说很多机器人公司正在努力造出更聪明、更灵活的机器人,那么像招商局狮子山人工智能实验室这样的参与者,想回答的是另一个问题:
当未来有成千上万台机器人进入工厂、园区甚至家庭时,它们该如何学习新技能,又该如何把这些技能稳定地复制到更多机器身上。
所以,对狮子山来说,叠好一件衣服只是一个起点。
金角财经声明:文章内容仅供参考,不构成投资建议。投资者据此操作,风险自担!

