中国四大厂押注的机器人,还叠不好家里的枕巾
2026-06-12 17:35
作者|黄晓彬
原创首发|蓝字计划
这可能是全世界最值钱的一团纸。
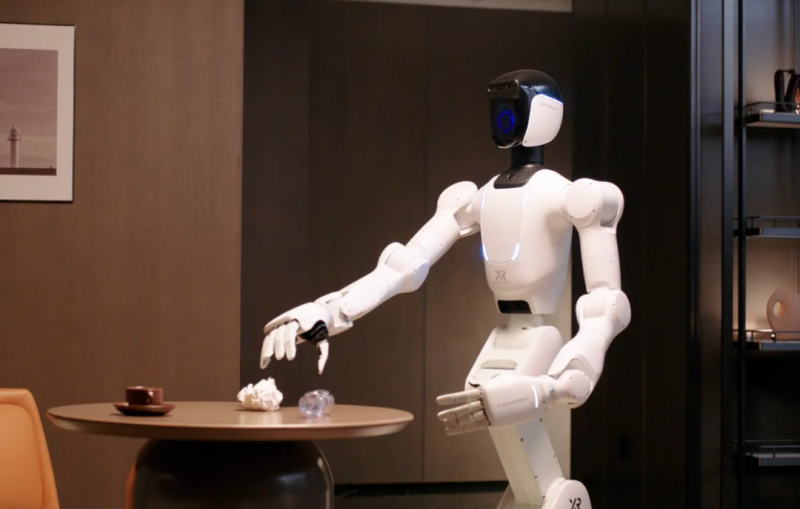
不久前,自变量机器人在一场发布会上,识别出 CEO 王潜随手丢在地上的纸团,随后自主规划路线、完成抓取,并把它丢进垃圾桶。
在多轮融资之后,这家国产机器人公司的累计融资金额已经接近 30 亿元。
自变量的投资方里,不乏小米战投、红杉中国等知名资本;它也是国内少数同时获得字节跳动、美团、阿里巴巴、小米等大厂投资的具身智能公司。
资本的热情,很大程度上来自其描绘的家庭机器人故事。
按照自变量此前释放的信息,搭载新一代具身大模型 WALL-B 的机器人,会进入真实家庭,承担整理鞋柜、垃圾分类、简单收纳、台面清洁等基础家务。
此前发布会上自主捡起纸团的动作,只是它对外展示能力的一部分。
它还和 58 到家合作,在深圳落地人机协同家政:机器人负责一部分标准化、重复性家务,保洁人员负责深度清洁和现场兜底。
外界对自变量的期待已经拉满了。
只不过,一团纸背后站着接近 30 亿融资,更让吃瓜群众们好奇的肯定是:如果它真能理解真实世界,那它能不能进普通家庭,替人干点真正的活?
最近,一项来自真实家庭的机器人保洁测试,却给出了一个哭笑不得的答案。
来保洁的机器人,先卡在家门口
这场真实家庭测试,来自 Vista 看天下的一篇报道。体验者是深圳用户“咸鱼”。
他花 149 元,在小程序上下单了自变量联合 58 到家推出的“机器人保洁”服务。按照服务说明,3 小时内,机器人会尝试完成整理、归置、叠衣物等基础家务。
但这次一起进门的,除了一台站在聚光灯下的具身智能机器人外,还有一名保洁人员,以及负责现场保障的工程师。
而且这次保洁任务的“考验”,从进门那一刻就开始了。
第一道考题,出现在家门口。

这台机器人采用轮式底盘,身高约 1.6 米,重量达到数百公斤。它很难像扫地机器人那样自己进入家庭场景。咸鱼住在二楼,幸好楼里有电梯,最后还是靠货拉拉师傅帮忙,才把机器人送进家门。
如果换成没有电梯的老小区,这项服务可能还没开始,就已经停在楼下。
然而进门之后,问题没有结束。
它的活动范围基本被限制在客厅。门槛不好过,卧室挤不进,卫生间也不方便进入,更谈不上在不同房间之间自由切换。
发布会上,它面对的是一团纸;普通家庭里,第一批对手变成了电梯、门槛、家具、杂物和狭窄空间。
当机器人终于顺利进门,来到工作地点之后,等着它的还有接下来长达3 小时的家务考试。
第一项是整理书桌。

在人类的理解里,“整理书桌” 的定义很多样,但大体上无非是把文具归位,把杂物收走,把常用物品留在顺手的位置。但似乎对在“咸鱼”家的自变量机器人来说,所谓整理书桌,更接近于“移动物体”。
它把桌上的东西夹起来、放下,再夹起来、再放下。东西确实动了,桌面却没有明显清爽起来。咸鱼看完之后,最后还是自己上了手。
第二项是摆鞋。

这件事就简单了。鞋就是鞋,拿起来,摆整齐,放回鞋柜,完成任务。
但对机器人来说,它能识别鞋子,也能移动鞋子,但对“收鞋”这件事的理解还停在表层。两只鞋要成对,朝向要一致,还要方便下次穿的时候拿出来,这才应该是摆鞋这个家务活的真正价值。
但机器人忙活一阵后,最终也就把鞋挪到了鞋柜附近,就宣告“摆鞋结束”。
不过比起前两个项目,最有戏剧性的,还得是叠枕巾。
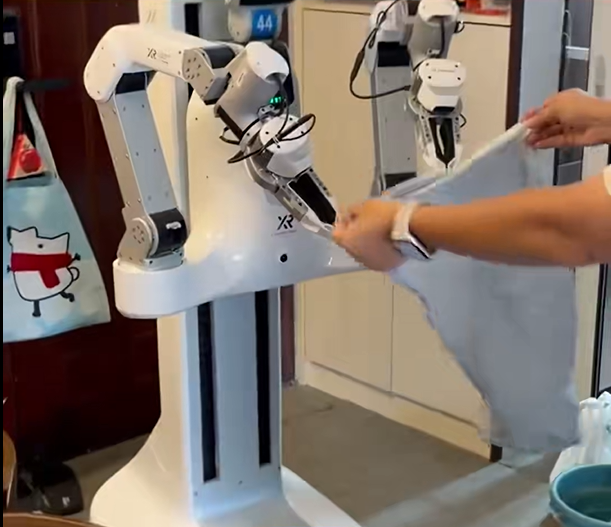
这是一件人类几乎不用思考的小事,可对机器人来说,却成了大难题。
布料很难伺候,枕巾会滑,会皱,会变形。夹爪轻了抓不住,重了又容易把布料弄歪。它刚拉开一角,另一边可能又卷成一团;好不容易铺平一点,布料又从夹爪里滑出去。
幸好,机器人最终还是完成任务,把枕巾叠成了方块,只是花费了十几分钟;而站在旁边的保洁人员伸手一抖、一抻,几秒钟就能把同样的事情处理完。
三个场景下来,耗费几个小时,这场 149 元的机器人保洁总算结束。但机器人这样的表现,和发布会上顺利捡起一团纸的高光时刻相比,确实有反差。
这次,机器人确实走进了真实家庭,也确实干起了活来。
但它这次“干活”,更像一次真实家庭里的产品试水,不仅后面得跟着技术维护人员,出了状况的时候能瞬间解决问题的,还是那个熟悉的,候在一旁的保洁人员。
这也把一个更现实的问题推到了台前:为什么网上会跑会跳的机器人,一进客厅就"变傻"?
机器人,天生不会做家务
早在 1980 年代,人工智能学者汉斯·莫拉维克就提出过一个反直觉的判断:让计算机完成下棋、计算、逻辑推理这类高阶任务,相对容易;让机器拥有人类婴儿一样的感知和行动能力,反而困难得多。
这样的判断,来源于机器人自带的三个“缺陷”。
第一个缺陷,是对标准环境的高度依赖。
在发布会现场,环境相对可控:地面平整,光线稳定,障碍物有限,任务边界也更清楚。机器人要处理的,是看到纸团、走过去、抓起来、再丢进垃圾桶这一条相对明确的任务链。
但在家庭场景中,光线会在一天中变化,孩子会把玩具丢在任何地方,椅子可能被挪动了五厘米,每一个细微变化,机器人都要重新识别、判断、规划动作。
如果缺少足够的真实家庭数据和现场泛化能力,机器人就很难对这些细微变化快速反应。哪怕只有5厘米的误差,就足以让机器人抓取失败,甚至把桌上的花瓶扫落在地。
斯坦福 AI Index 2026 给过一组很刺眼的数据:在 RLBench 这类仿真操控任务中,机器人成功率可以达到 89.4%;到了真实家庭任务里,成功率只有约 12%。
第二个缺陷,是缺乏常识。
机器人能识别出“鞋”,不代表它知道鞋该放进鞋柜;能识别出“纸”,也不代表它知道那是废纸、便签,还是主人随手放在桌上的资料。
人类会不断累积生活经验,知道东西该不该扔,放在哪里顺手,什么叫整齐,什么叫已经收拾好;对机器人来说,这些判断都要靠模型和数据慢慢补课。
至于机器人的最后一个缺陷,是手。
对柔性物体的操作,是目前具身智能公认的“硬骨头”。正如前面的叠枕巾,目前的机器人大多只有位置控制和力矩控制,它不知道枕巾是软的,也不知道在叠的过程中滑到哪里了。
但人类干活时,除了用眼睛看,还会靠手感调整力度;很多机器人现在更多依赖视觉和力控,触觉反馈远远没有人手细腻。
所以,三个缺陷的叠加,就让看起来最没有门槛的家务,成了具身智能最硬核的难题。
而针对机器人的缺陷,自变量给出的解决方案是“大模型”。

按照它此前释放的信息,自变量正在从 WALL-A 这类视觉-语言-动作模型,推进到新一代具身大模型 WALL-B。它想让机器人把视觉、语言、动作、物理预测和身体感知放在一起处理。
通俗点说,机器人不能只会“夹起鞋子”,还要理解鞋该放到哪里;不能只会“拿起枕巾”,还要理解什么状态才算叠好;不能只会“捡起纸团”,还要判断这张纸到底该不该扔。
这条路听起来合理,但始终绕不开一个问题:数据。
只是,家庭数据的获取成本极高且有隐私风险。这也解释了为什么自变量愿意和 58 到家合作,把机器人保洁服务推到 C 端。
149 元的价格,很难覆盖机器人、工程师和保洁人员一起上门的成本,但却可以换取宝贵的“真机数据”。每一次机器人卡在门槛前,每一次它把鞋放错位置,都是在为那个“世界模型”添砖加瓦。
问题在于,数据可以慢慢补,用户和市场未必愿意一直等。资本可以先为想象力买单,而用户只会为结果买单。
发布会上捡起一团纸,让市场看到了“机器人走进家庭”的希望;但“咸鱼”家的这次测试,又暴露了个现实问题:家务机器人离真正成为家庭劳动力,至少现在还不行。
只能说,乐观一点看,自变量至少把机器人带进了真实家庭;但现实一点看,它现在更像一个刚开始上岗培训的新人。
至于什么时候能像洗衣机、扫地机器人一样,成为普通家庭默认的一部分,恐怕还得等它先学会一件事:
别让人类在旁边替它收拾残局。
参考资料:
Vista看天下《“我们体验了149元的机器人保洁,发现让它干活还得给它配俩保姆”》
金角财经声明:文章内容仅供参考,不构成投资建议。投资者据此操作,风险自担!

